My Projects
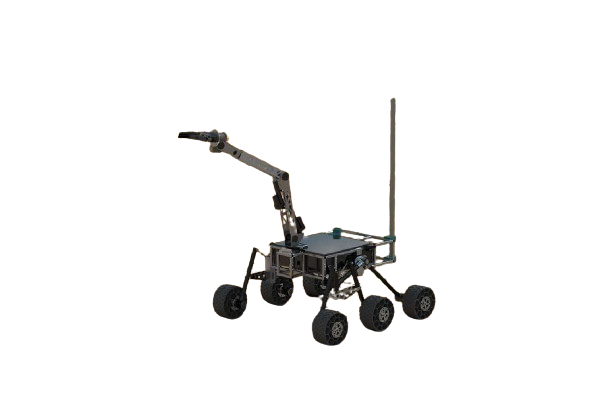
Prayaan (Team Project)
This project involves the development of an advanced 6-wheeled rover utilizing a differential drive system for robust terrain navigation. The rover is equipped with a ZED2 camera for 3D mapping and localization, employing Simultaneous Localization and Mapping (SLAM) techniques for accurate environmental awareness. Odometry data is meticulously fused using Kalman filters, integrating inputs from various sensor sources to ensure precise movement tracking. For path planning, the project leverages the Move Base framework, utilizing the A* algorithm for efficient route determination and a dynamic window approach for local path planning. This sophisticated integration of technologies enables the rover to navigate complex environments with high precision and adaptability.
Read More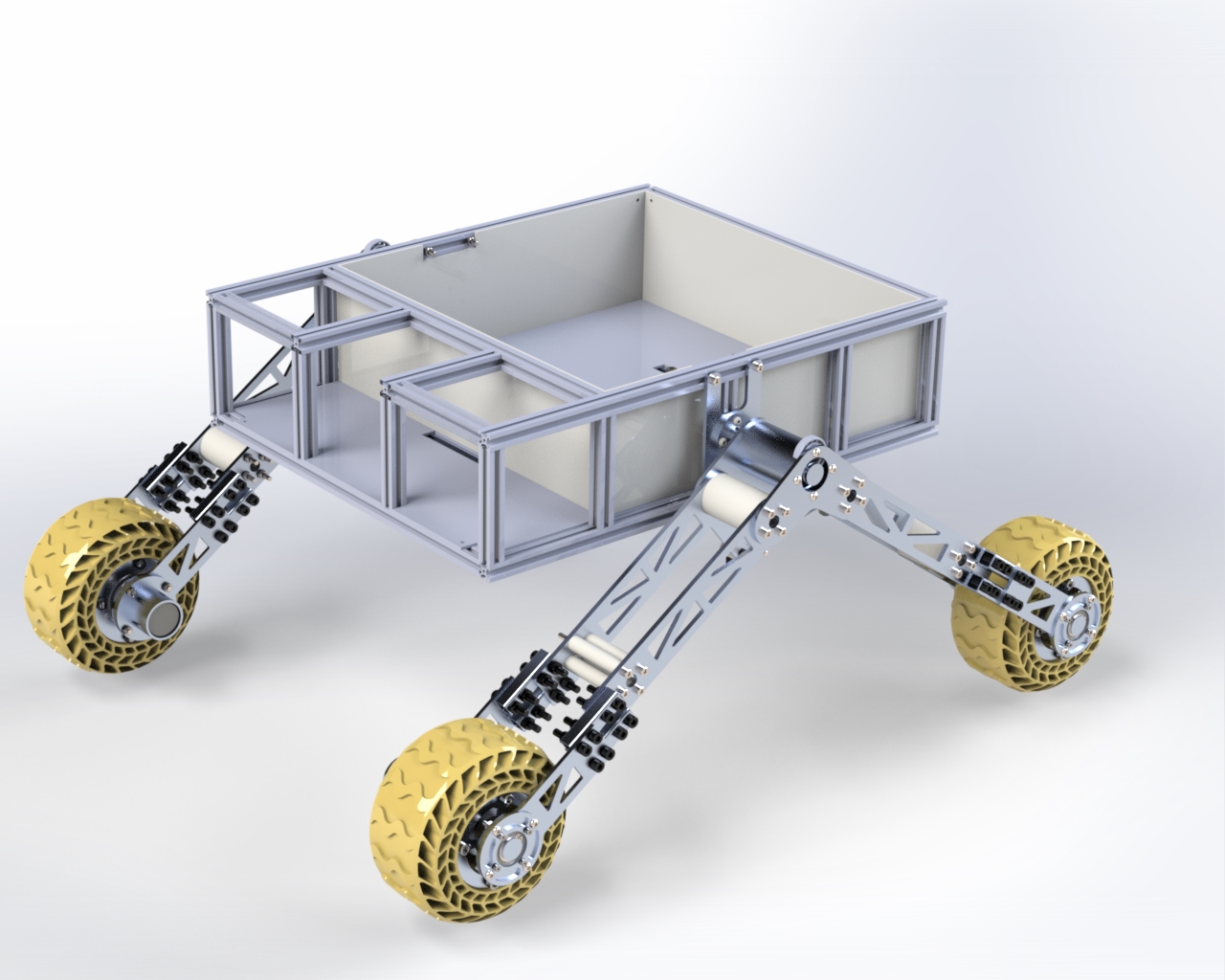
Abhyaan (Team Project)
This project involves the development of a four-wheeled rover with a differential drive system, designed for advanced 3D navigation and exploration tasks. The rover employs a ZED2 stereo camera for high-definition mapping and localization, utilizing Simultaneous Localization and Mapping (SLAM) techniques to effectively understand and navigate its environment. The integration of various sensor inputs, including IMU and wheel encoders, is crucial for accurate odometry. These data sources are fused using Kalman filters, ensuring precise and reliable tracking of the rover's movements. For path planning, the system employs the Move Base framework, which uses the A* algorithm for global route determination. The local path planning is handled by a Dynamic Window Approach, allowing the rover to adapt to changing environments and avoid obstacles dynamically. This combination of technologies enables the rover to autonomously navigate complex terrains with high efficiency and accuracy.
Read More
3-D printed UR3 (Team Project)
This project revolves around a 3-D printed UR3 robotic arm, innovatively designed to perform autonomous pick and place operations. Leveraging the MoveIt framework, the arm is equipped with advanced inverse kinematics capabilities, enabling precise and adaptive movement. Key to its functionality is the integration of octomap generation, which facilitates a detailed 3D mapping of the surrounding environment, enhancing the robot's spatial awareness and obstacle avoidance. Additionally, the system incorporates ArUco tag detection, a critical feature that allows the robotic arm to extrapolate goal poses accurately. This combination of technologies empowers the UR3 arm to identify, navigate, and manipulate objects autonomously, showcasing a significant leap in robotic automation and efficiency.
Read More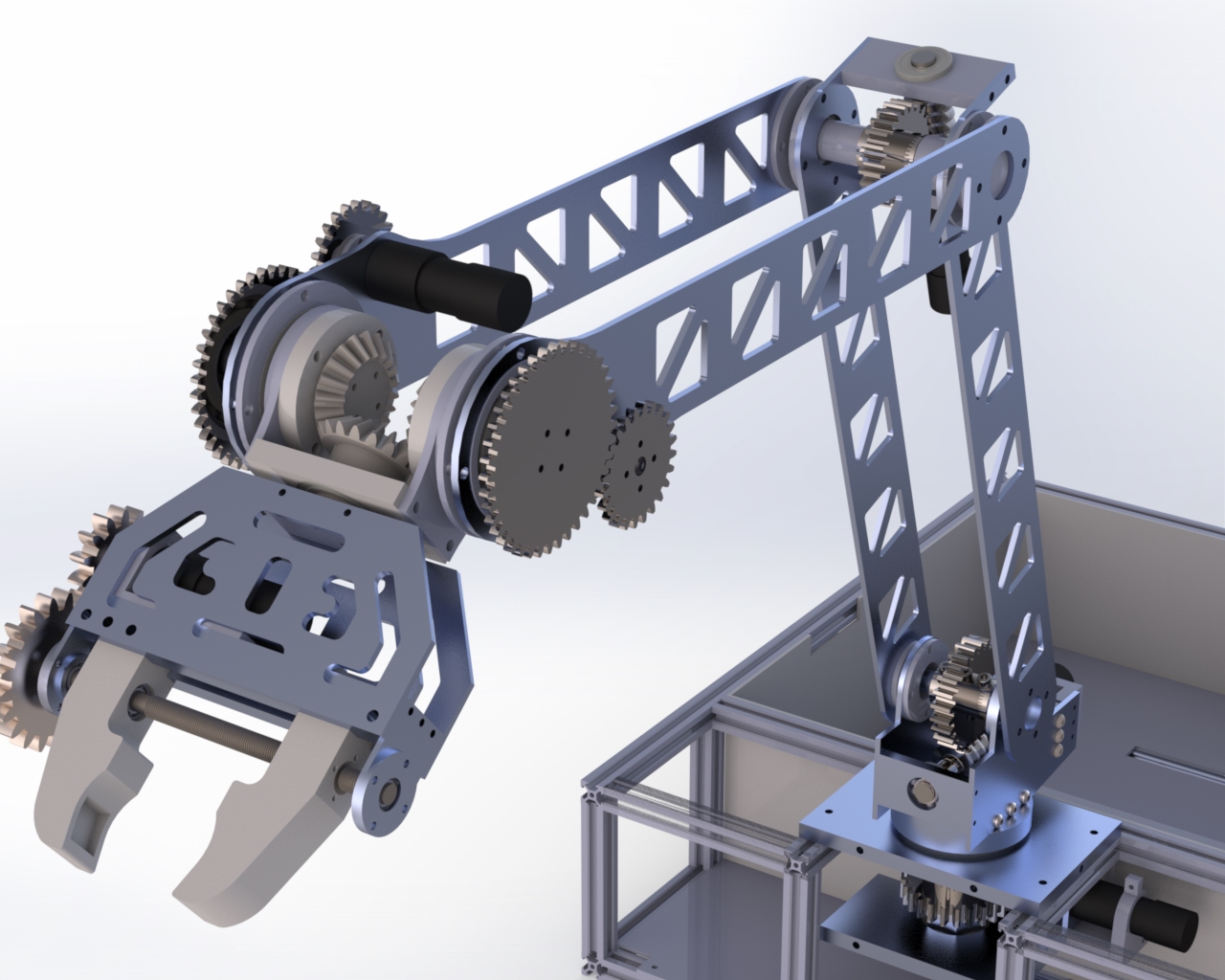
Rover - Arm (Team Project)
In this innovative project, we developed a 6 Degrees of Freedom (DOF) metal arm for a prototype Martian rover, aimed at enhancing its operational capabilities in simulated extraterrestrial environments. This robotic arm was specifically designed to handle complex tasks, mimicking the challenging conditions of Mars. Utilizing the advanced capabilities of MoveIt, we implemented sophisticated inverse kinematics algorithms, which significantly improved the precision and efficiency of the arm's movements. The primary objective was to ensure ease of task completion during the European Rover Challenge (ERC), where the rover's ability to perform under Martian-like conditions was critically assessed. The arm's design focused on robustness and versatility, allowing for a wide range of movements and manipulations essential for the successful execution of various tasks on a Martian terrain simulation. The integration of this 6 DOF arm into the rover prototype marked a significant step forward in developing more capable and autonomous exploration vehicles for future Mars missions.
Read More
3 wheeled car
This project focuses on developing a 3-wheeled autonomous car, leveraging the robust capabilities of ROS (Robot Operating System) for efficient 2D navigation. At the heart of the system is a Raspberry Pi, which serves as the primary computing unit, orchestrating the overall navigation and control. The car's movement is precisely monitored using encoders, providing critical feedback on wheel rotation and speed. This data is essential for accurate navigation and maneuvering. Two Arduino Nano boards are integrated into the design, responsible for managing the lower-level control of the motors and sensors. These Arduinos handle the real-time operations, ensuring smooth operation and responsiveness of the vehicle. The combination of ROS for high-level navigation tasks and the Arduino-based control system creates a well-balanced, efficient, and reliable platform for exploring autonomous 2D navigation in a 3-wheeled car setup. The project not only showcases the potential of integrating different technologies but also serves as a valuable model for compact and efficient vehicle design in robotics.
Read More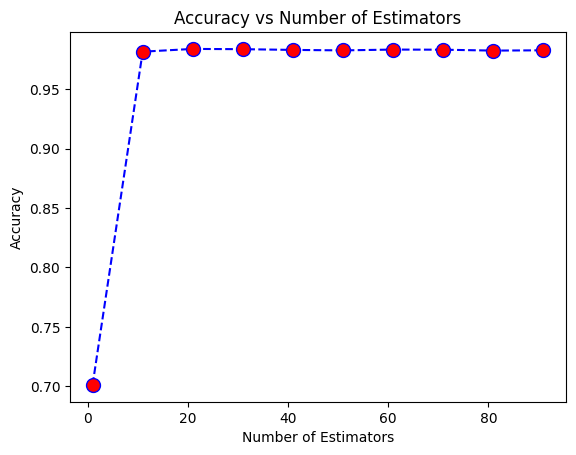
Malware analysis using AI
This project focuses on leveraging advanced artificial intelligence (AI) techniques for the efficient and accurate analysis of malware. By implementing a combination of machine learning algorithms, including deep learning and neural networks, the system is designed to detect, classify, and analyze various types of malware with high precision. The AI model is trained on a vast dataset of known malware signatures, behavioral patterns, and anomaly detection techniques to identify potential threats. This approach not only enhances the detection rate of new and evolving malware but also reduces false positives, ensuring robust cybersecurity. The project integrates with existing security frameworks to provide real-time monitoring and threat assessment, making it a valuable tool for organizations seeking to bolster their digital defenses against sophisticated cyber threats.
Read More
Diabetes Retinopathy
PThe core objective is to develop an AI-based diagnostic tool that leverages advanced machine learning algorithms and retinal imaging for early detection of this condition. This project aims to bridge the gap in early diagnosis, significantly reducing the risk of blindness among diabetic patients. Additionally, it encompasses an educational campaign to raise awareness about the importance of regular eye examinations for diabetes patients and collaborates with healthcare providers to enhance treatment protocols and management strategies for those diagnosed with diabetic retinopathy. The project's ultimate goal is to improve the quality of life for individuals with diabetes through innovative technology and proactive healthcare initiatives.
Read More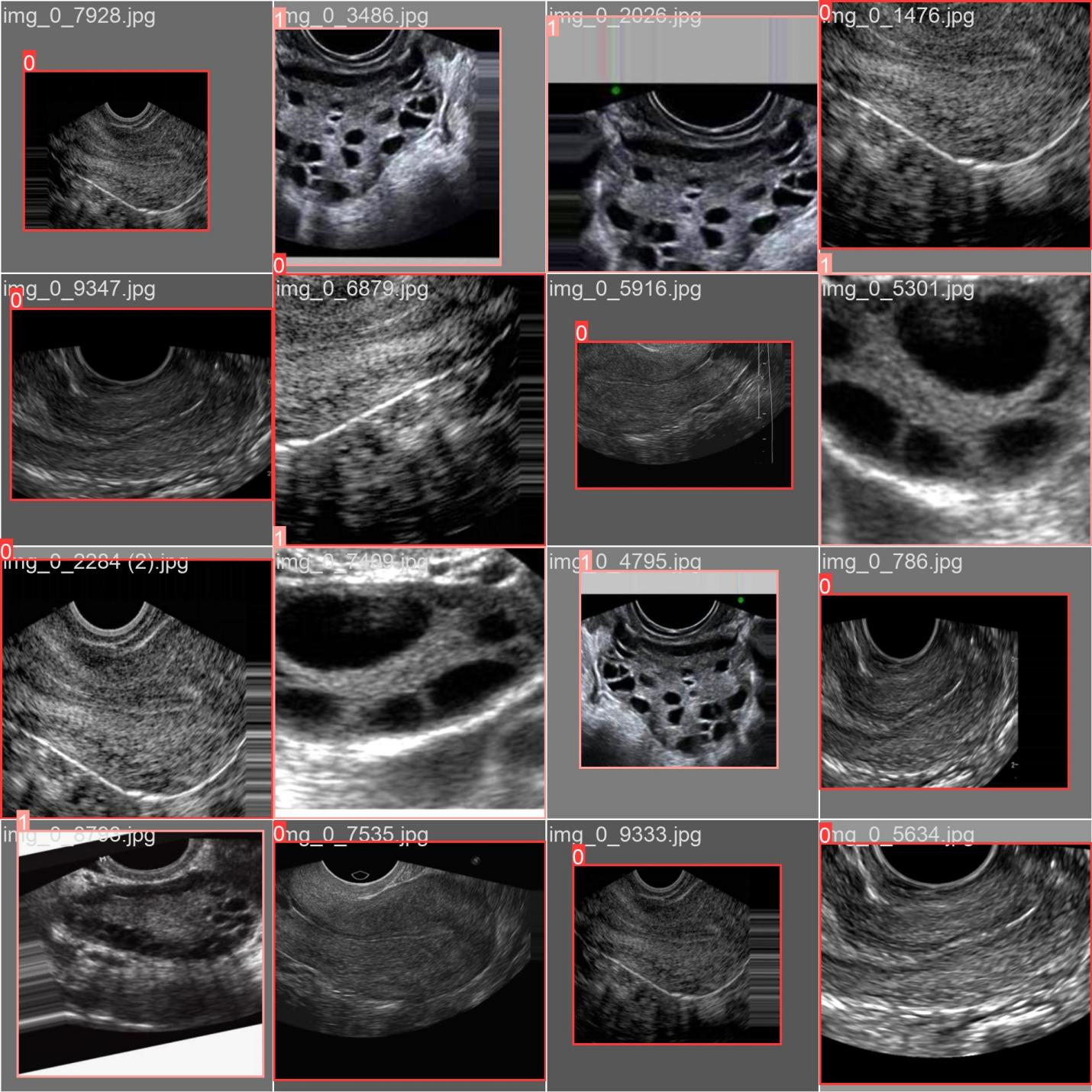
PCOS detection using ultrasound images
This project aims to harness the capabilities of advanced image processing and machine learning algorithms to analyze ultrasound images of ovaries. The system will be designed to identify the characteristic features of PCOS, such as enlarged ovaries with numerous small cysts, using a database of annotated ultrasound images.
Read More